Hi,欢迎来到一心科研,让科研简单!
全球科技产品 - 原装进口/品质保证/专业服务




Hello Robot Stretch3 | 完全集成的移动机械手
适用于科研的高性能移动机械手
搭载 3D摄像头、9自由度惯性测量单元(IMU)、LiDAR 和 车载计算机 的自主移动机器人,配备可替代人类手臂的纤细伸缩机械臂与夹爪。
专为在 家庭、职场 等人类共存环境设计,可通过远程操控执行多种任务,例如:拾取玩具、从烘干机中取出衣物、与孩子进行游戏等。该设备特别适合 初创企业、公司 及大学等机构进行机械臂相关研究。
主要用途
机器人工程与AI研究:开发自主运动控制算法
人类辅助机器人验证:动作安全测试与人机交互研究
ROS 2应用开发:机器人控制与算法实现
机器学习优化:强化学习与机器学习算法研究
实际场景验证:家庭/办公室环境下的机器人应用实验
产品负责人
王工(William)
技术销售工程师
☎︎ 15317330587(同微信)
✉ sales@yixinkeyan.com

扫码添加微信
产品型号
| 产品名称 | 规格型号 | 货期 | 单价(元) |
|---|---|---|---|
| Hello Robot Stretch3 | Stretch 3 | 2-4周 | 折扣价 |
| 其他Hello Robot产品 | 请告诉我们型号 | 2-4周 | 折扣价 |
产品描述
Stretch 3
一款配备 机械臂、夹爪、移动底盘、多种传感器、计算机、软件、Python SDK 及自主演示功能 的轻量高性能移动操作机器人。
通过 Web界面 可实现全球任意地点远程操控。
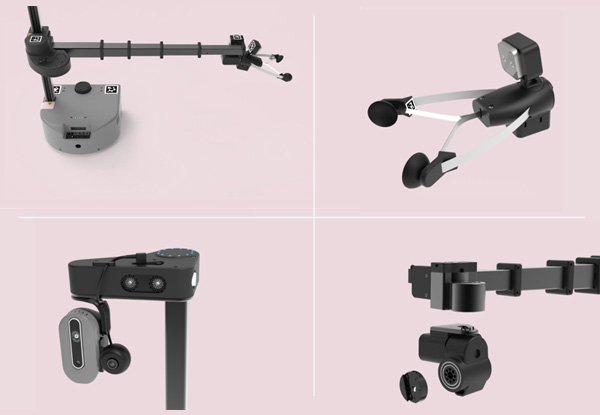
Stretch 3 特点·新功能
・标配 Dex Wrist :为夹爪新增俯仰(Pitch)与横滚(Roll)自由度,实现更灵活操作
・夹爪搭载 RealSense D405 深度相机
・配备 140°广角RGB头部摄像头
・一键式工具快速更换功能
・相比Stretch 2,计算性能提升 2-3倍
・符合 FCC Class A 认证标准
・配备电子升降刹车系统的升级版电控单元
・ROS 2 Humble 全面适配 Ubuntu 22.04
・新增包含 ROS Nav2 与 MoveIt 2 的教程
・通过可配置浏览器界面实现 全球可操作的Web远程控制 (含自主功能)
・支持 具身AI (含数据采集用灵巧远程操控套件、外置GPU支持、新版Python演示)
套装内容
・Stretch 3 主机(※)
・电池充电器
・手柄式远程操控器
・开源代码
※主机包含 Stretch Gripper 3 与 DexWrist 3
主要特性·规格
有效负载(含夹爪):2kg
重量:24.5kg
尺寸:33×34×141cm
续航时间:2-5小时
支持系统:ROS 2与Python SDK
开源功能:
自主演示
校准URDF模型
操控方式:手柄/网页/灵巧操控
底盘:差速驱动
机械臂自由度(DOF):
总计7自由度
2自由度底盘
1自由度垂直升降
1自由度伸缩臂
3自由度腕部
其他自由度(DOF):
1自由度夹爪
2自由度头部
腕部运动学:偏航/俯仰/横滚
夹爪类型:自适应抓取器
传感器配置:
夹爪RGBD相机
云台式头部RGBD相机
导航激光雷达
麦克风阵列
集成计算机
硬件规格
・Cartesian Manipulator
・Stretch Gripper 3
・DexWrist 3
・Mobile Base
・Sensor Head
・Computation & Power
・Developer Friendly
配件
Stretch Dex Teleop Kit
用于控制Stretch 3夹爪 6自由度姿态与抓握动作 的配件
Stretch WiFi Access Point
专为Stretch 3预配置的 NETGEAR WiFi路由器 ,可实现自动局域网连接
Stretch Docking Station
支持Stretch 自主充电 的对接站
(开源自动对接软件已在GitHub发布,目前处于开发阶段)
Stretch 2 Upgrade Kit
面向现有Stretch 2用户的升级套件。
包含以下三项组件,加装至Stretch 2后即可实现与Stretch 3 近似性能(※) :
DexWrist 3
Stretch Gripper 3(含D405相机)
广角头部导航相机
※Stretch 2与3搭载的NUC计算机型号不同






